日前,北京航空航天大學(xué)無(wú)人系統(tǒng)研究院王英勛教授團(tuán)隊(duì)在《航空學(xué)報(bào)》期刊發(fā)表了封面文章,題為《面向多目標(biāo)跟蹤的集群無(wú)人機(jī)自組織共識(shí)決策方法》。提出了集群無(wú)人機(jī)自組織共識(shí)決策方法,將集群成員間的信息交互與共識(shí)、目標(biāo)分配決策緊密耦合,確保各無(wú)人機(jī)對(duì)任務(wù)態(tài)勢(shì)形成共識(shí),動(dòng)態(tài)決策每架無(wú)人機(jī)的最優(yōu)跟蹤對(duì)象,實(shí)現(xiàn)集群的自組織分組、各分組規(guī)模的靈活動(dòng)態(tài)調(diào)整,增強(qiáng)了無(wú)人機(jī)集群在多目標(biāo)跟蹤任務(wù)下的自組織協(xié)同能力。論文由趙江、皮明豪、田栢苓、池沛和王英勛共同完成,王英勛教授為團(tuán)隊(duì)帶頭人,池沛教授為通信作者。
《航空學(xué)報(bào)》第16期封面
無(wú)人集群在公共安全、災(zāi)害救援、交通管理等眾多領(lǐng)域扮演著重要角色。在應(yīng)急救援中的目標(biāo)搜尋等復(fù)雜應(yīng)用場(chǎng)景中,存在著分散且快速變化的任務(wù)或目標(biāo),單一無(wú)人集群往往難以勝任這種任務(wù)需求,因此需進(jìn)行目標(biāo)分配與集群分組。現(xiàn)有關(guān)于目標(biāo)分配方法的研究通常采取理想化假設(shè),面臨著決策響應(yīng)慢、難以實(shí)時(shí)協(xié)同分工、對(duì)通信延遲和距離敏感等痛點(diǎn),無(wú)法有效應(yīng)對(duì)多目標(biāo)動(dòng)態(tài)變化場(chǎng)景下對(duì)于多目標(biāo)的追蹤問(wèn)題。
針對(duì)現(xiàn)有集群無(wú)人機(jī)目標(biāo)分配方法在實(shí)時(shí)協(xié)同決策與調(diào)配方面的不足,本文提出了一種面向多目標(biāo)跟蹤的集群無(wú)人機(jī)自組織共識(shí)決策方法。該方法基于分布式架構(gòu),通過(guò)集群內(nèi)部的信息動(dòng)態(tài)共享,實(shí)現(xiàn)無(wú)人機(jī)個(gè)體間的信息共識(shí)和基于信息共識(shí)的自主協(xié)同決策。整體架構(gòu)包括3大關(guān)鍵模塊:集群信息共識(shí)、集群協(xié)同決策與集群目標(biāo)跟蹤控制。
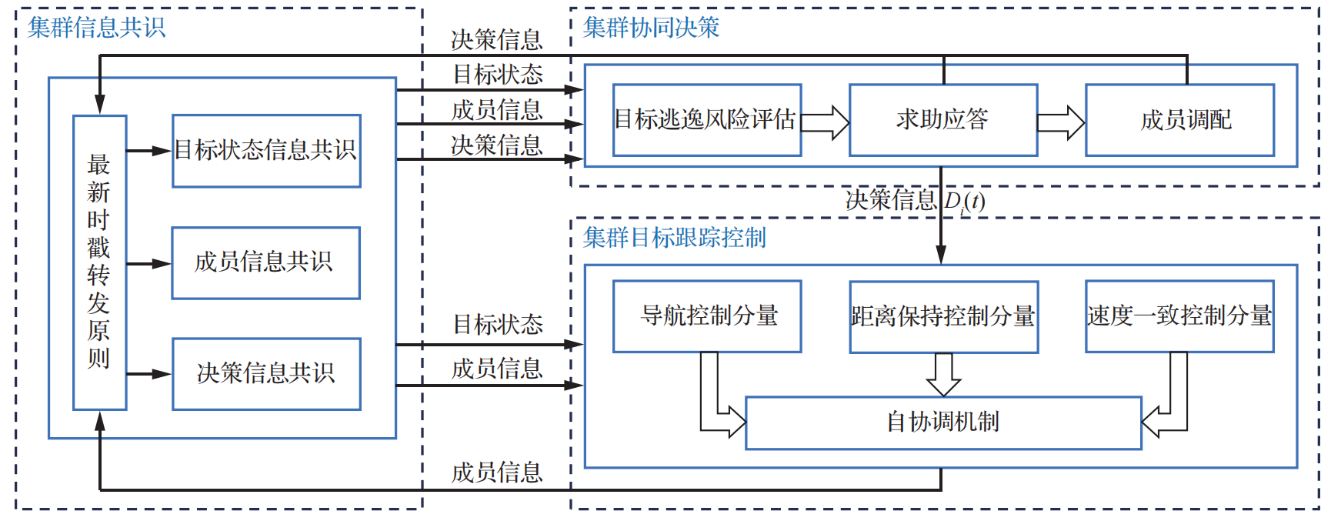
集群無(wú)人機(jī)共識(shí)決策方法架構(gòu)圖
本文提出的方法可在目標(biāo)跟蹤過(guò)程中實(shí)現(xiàn)動(dòng)態(tài)目標(biāo)分配決策,可根據(jù)各目標(biāo)的逃逸風(fēng)險(xiǎn)大小確定為各目標(biāo)分配的無(wú)人機(jī)數(shù)目。在MATLAB仿真環(huán)境中,模擬由12架無(wú)人機(jī)組成的集群對(duì)3個(gè)地面移動(dòng)目標(biāo)進(jìn)行跟蹤。
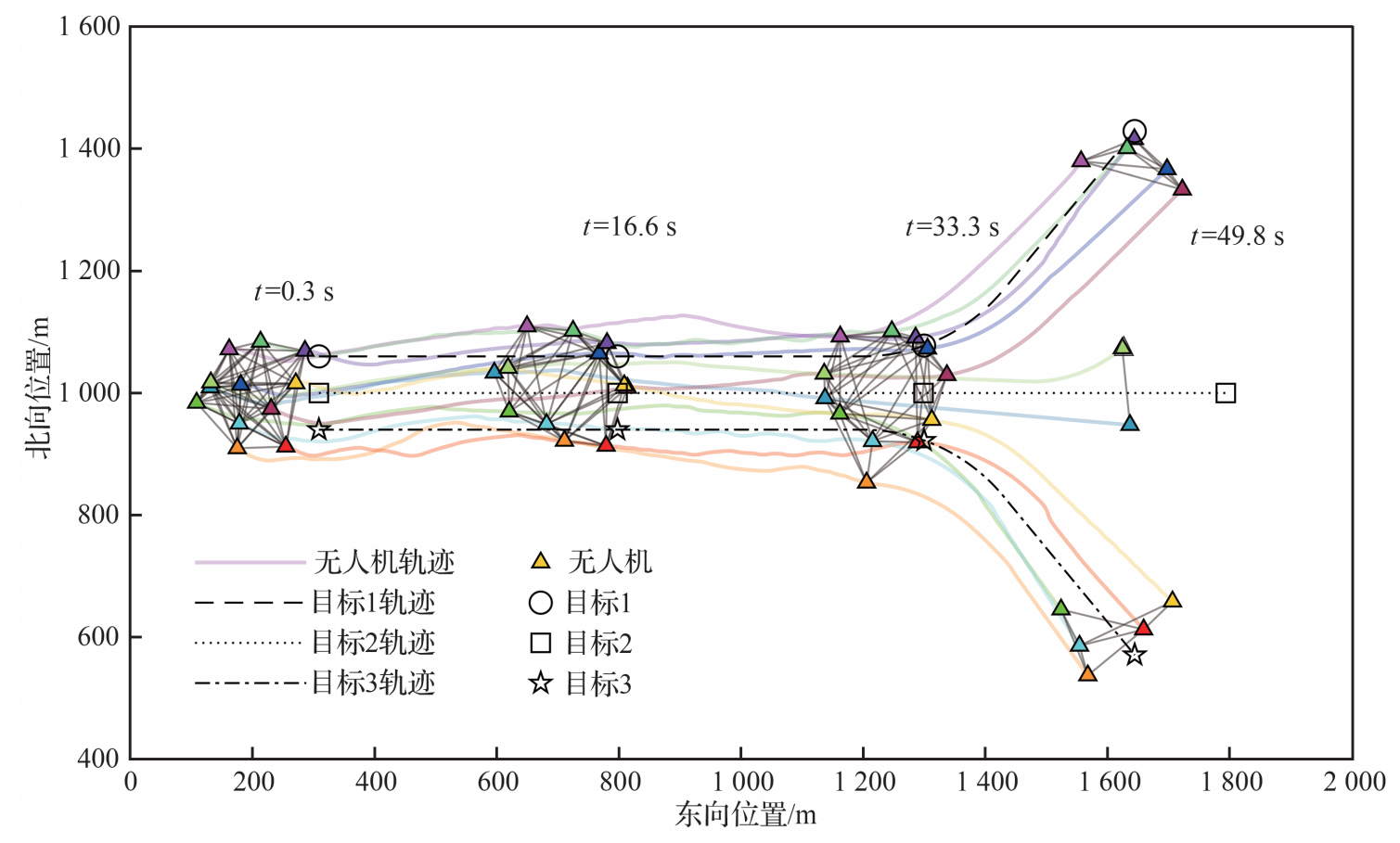
集群無(wú)人機(jī)與目標(biāo)軌跡
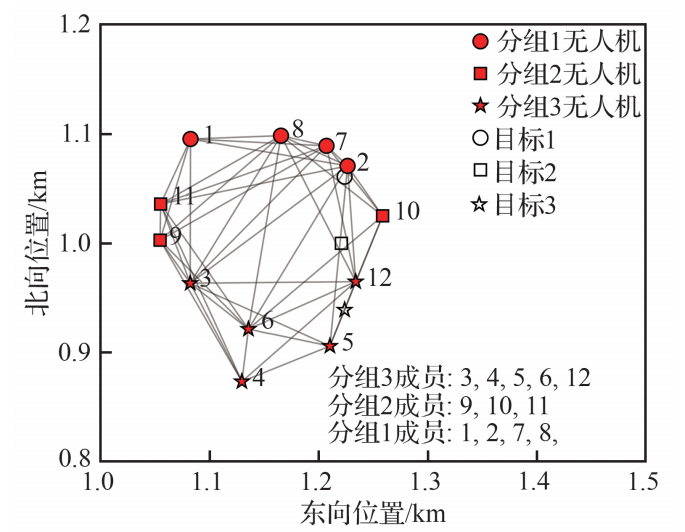
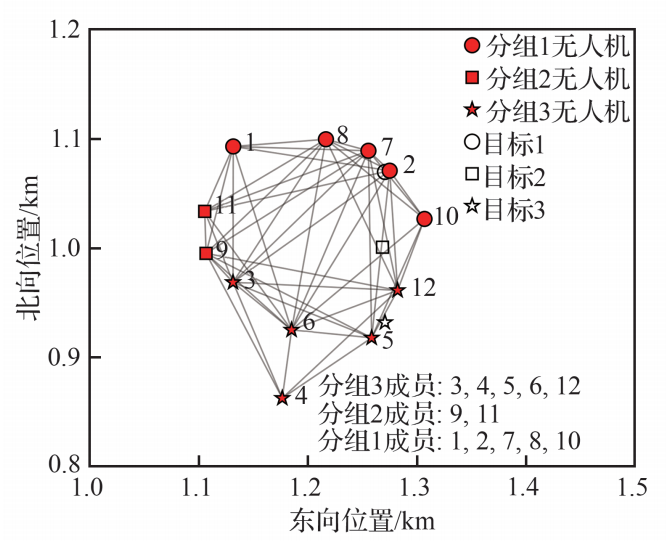
集群分組狀態(tài)
研究結(jié)果表明,所提出的共識(shí)決策方法可在多目標(biāo)分離運(yùn)動(dòng)的場(chǎng)景下實(shí)現(xiàn)集群的自組織分組,適用于集群無(wú)人機(jī)跟蹤多個(gè)分散運(yùn)動(dòng)目標(biāo)的場(chǎng)景。算法對(duì)目標(biāo)的機(jī)動(dòng)以及條件參數(shù)的變化具有適應(yīng)性,共識(shí)決策機(jī)制在其能力邊界內(nèi)可保持無(wú)差率在0.9左右。
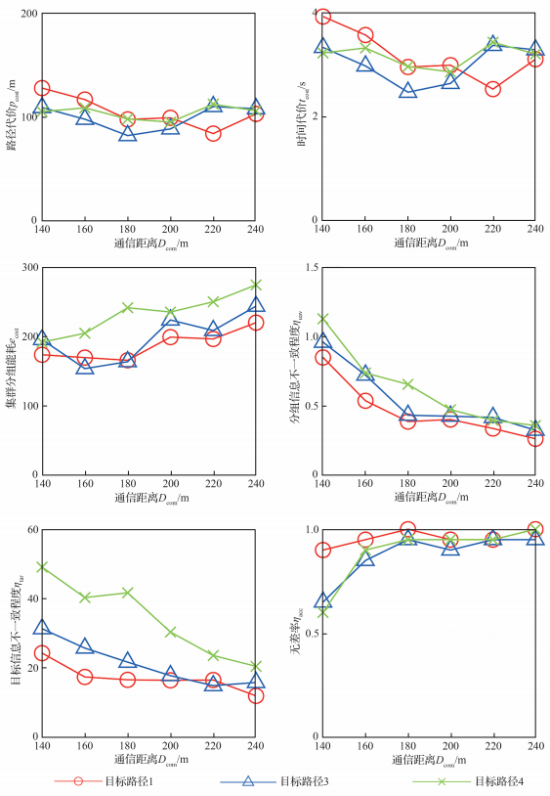
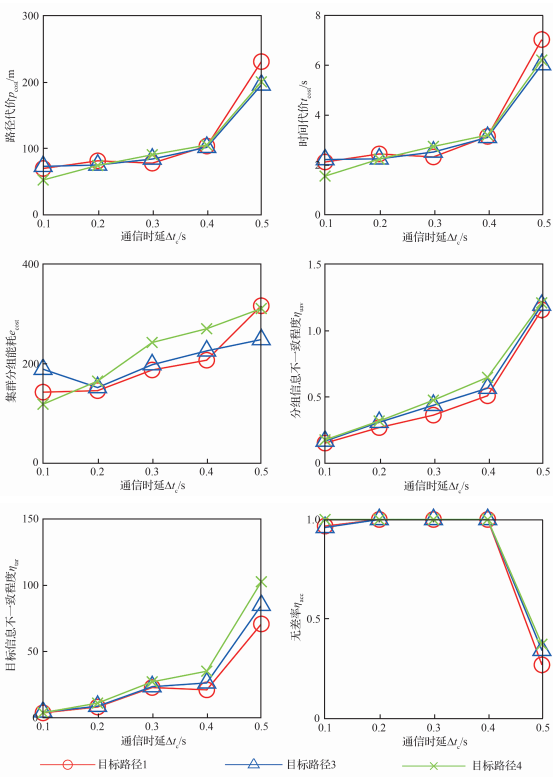
通信距離對(duì)共識(shí)決策性能指標(biāo)的影響和通信時(shí)延對(duì)共識(shí)決策性能指標(biāo)的影響

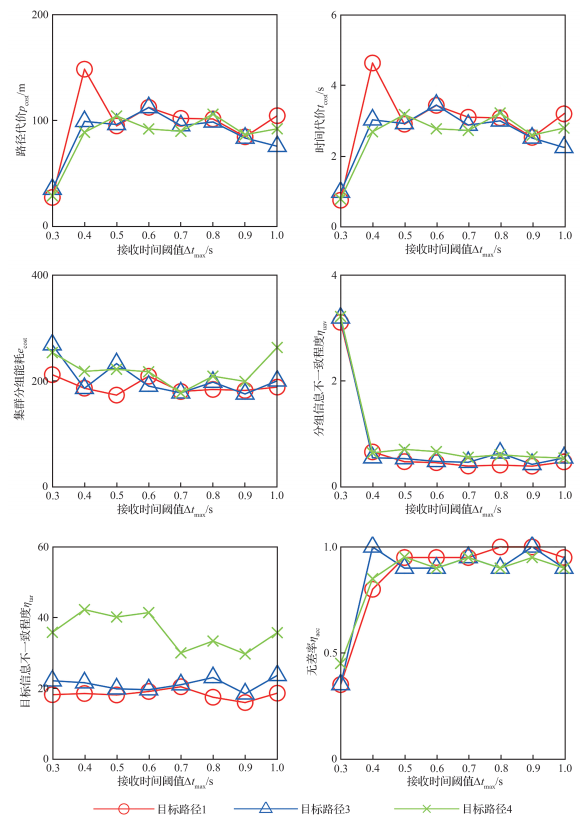
共識(shí)決策周期對(duì)共識(shí)決策性能指標(biāo)的影響和接收時(shí)間閾值對(duì)共識(shí)決策性能指標(biāo)的影響
論文原文鏈接:https://hkxb.buaa.edu.cn/CN/10.7527/S1000-6893.2024.31635


